Bu yazımızda, modern inşaat mühendisliği yazılımlarının kalbinde yatan Sonlu Elemanlar Metodunun ne olduğunu ve bu metodu kullanan programların (SAP2000, ETABS, ANSYS vb.) arka planda nasıl çalıştığını inceleyeceğiz.
Bu tarz programları kullanan her mühendisin, arka planda dönen matematiği ve seçtiği eleman tiplerinin (çubuk, kabuk vb.) ne anlama geldiğini detaylıca bilmesi gerekir. Üniversitelerde iki dönem boyunca okutulan bu devasa konunun tamamını bir yazıya sığdırmak imkânsız olsa da, bu yazıda en temel ve kritik noktalara değineceğiz.
Direkt Rijitlik Yöntemi

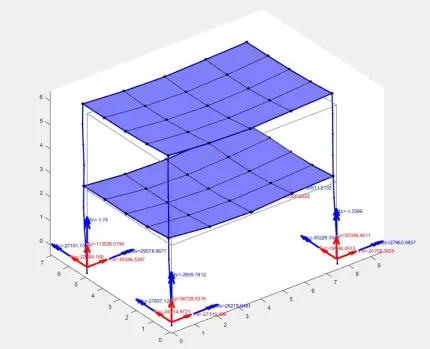
Sonlu elemanlar metodunu kullanan yapısal analiz programlarının temeli Direkt Rijitlik Yöntemi’ne dayanır. Bu yöntemde karmaşık ve sürekli bir sistem, sonlu sayıda idealize edilmiş küçük parçalara (elemanlara) bölünür. Bu elemanların birbirine bağlandığı noktalara ise düğüm noktası denir.
Sistemin davranışı şu meşhur matris denklemi ile ifade edilir:
Bu denklemde;
-
F: Dış kuvvetler (yük) vektörünü,
-
[K]: Sistemin rijitlik matrisini,
-
u: Düğüm noktalarındaki yer değiştirmeler (deplasman) vektörünü ifade eder.
Program, yapıya etkiyen yükleri F ve yapının rijitliğini [K] tanımladıktan sonra, denklemi çözerek u yer değiştirmelerini bulur. Bu yöntemde bilinmeyen değerler sadece düğüm noktalarında hesaplanır.
Lokal ve Global (Sistem) Rijitlik Matrisleri
Yapımızı oluşturacak her bir elemanın kendi eksenine göre bir lokal rijitlik matrisi vardır. Örneğin, üç boyutlu uzayda bir çerçeve (kiriş/kolon) elemanının her bir düğüm noktasında 6 adet serbestlik derecesi (3 öteleme, 3 dönme) bulunur. İki ucu olan bir çubuk elemanın lokal rijitlik matrisi 12×12 boyutlarındadır.
Ancak analiz lokal eksenlerde değil, tüm yapıyı kapsayan genel (global) eksenlerde yapılır. Bu nedenle her elemanın lokal rijitlik matrisi, bir rotasyon (dönüşüm) matrisi ile çarpılarak Global (Sistem) Rijitlik Matrisine dönüştürülür ve birleştirilir. Sisteme etkiyen yük vektörü ve global rijitlik matrisi oluşturulduktan sonra düğüm noktalarının yer değiştirmeleri topluca hesaplanır.
Galerkin Metodu ve Yaklaşık Hesap (Şekil Fonksiyonları)
Sadece düğüm noktalarındaki değerleri bildiğimizi söylemiştik. Peki iki düğüm noktası arasındaki, yani elemanın ortasındaki bir noktada meydana gelen gerilmeyi veya yer değiştirmeyi nasıl buluyoruz?
İşte burada diferansiyel denklemleri basitleştiren Galerkin Metodu gibi sayısal yaklaşımlar devreye girer. Çözmemiz gereken gerçek problem 3. dereceden karmaşık bir eğri (polinom) olabilir. Ancak biz, iki düğüm noktası arasına 1. veya 2. dereceden daha basit şekil fonksiyonları (shape functions) atayarak yaklaşık bir hesap yaparız.

Kullanılan polinomun derecesi ve eleman sayısı (mesh sıklığı) artırıldıkça, yaklaşık sonuçlarımız analitik gerçek sonuçlarla birebir örtüşmeye başlar. FEM’in ana mantığı budur: Çözümü imkânsız veya çok zor olan büyük bir problemi, kolay çözülebilir binlerce küçük parçaya (elemana) bölmek ve yaklaşık ama çok hassas bir sonuç elde etmek.
FEM’de Kullanılan Temel Eleman Çeşitleri
Doğru analizin sırrı, doğru elemanı seçmekten geçer. Programı kullanan mühendis ne yaptığını biliyorsa gerçeğe çok yakın sonuçlar alır; aksi takdirde “çöp girer, çöp çıkar” (garbage in, garbage out) kuralı işler.
Kafes Eleman: Sadece eksenel (normal) kuvvet taşır. Düğüm noktalarında moment aktarmaz (mafsallıdır).

Çerçeve Elemanı: Kolon ve kirişleri modellemek için kullanılır. Düğüm noktası başına altı serbestlik derecesi bulunur. Eksenel kuvvet, kesme kuvveti, eğilme ve burulma momentlerine karşı rijitliği vardır.

Levha Eleman: Sadece düzlem içi rijitliği vardır, düzlem dışı rijitliği sıfırdır (kağıt gibi bükülebilir). Yalnızca membran kuvvetlerini taşır.

Plak (Plate) Eleman: Levhanın aksine sadece düzlem dışı bükülme (eğilme momentleri ve kesme) rijitliğine sahiptir.

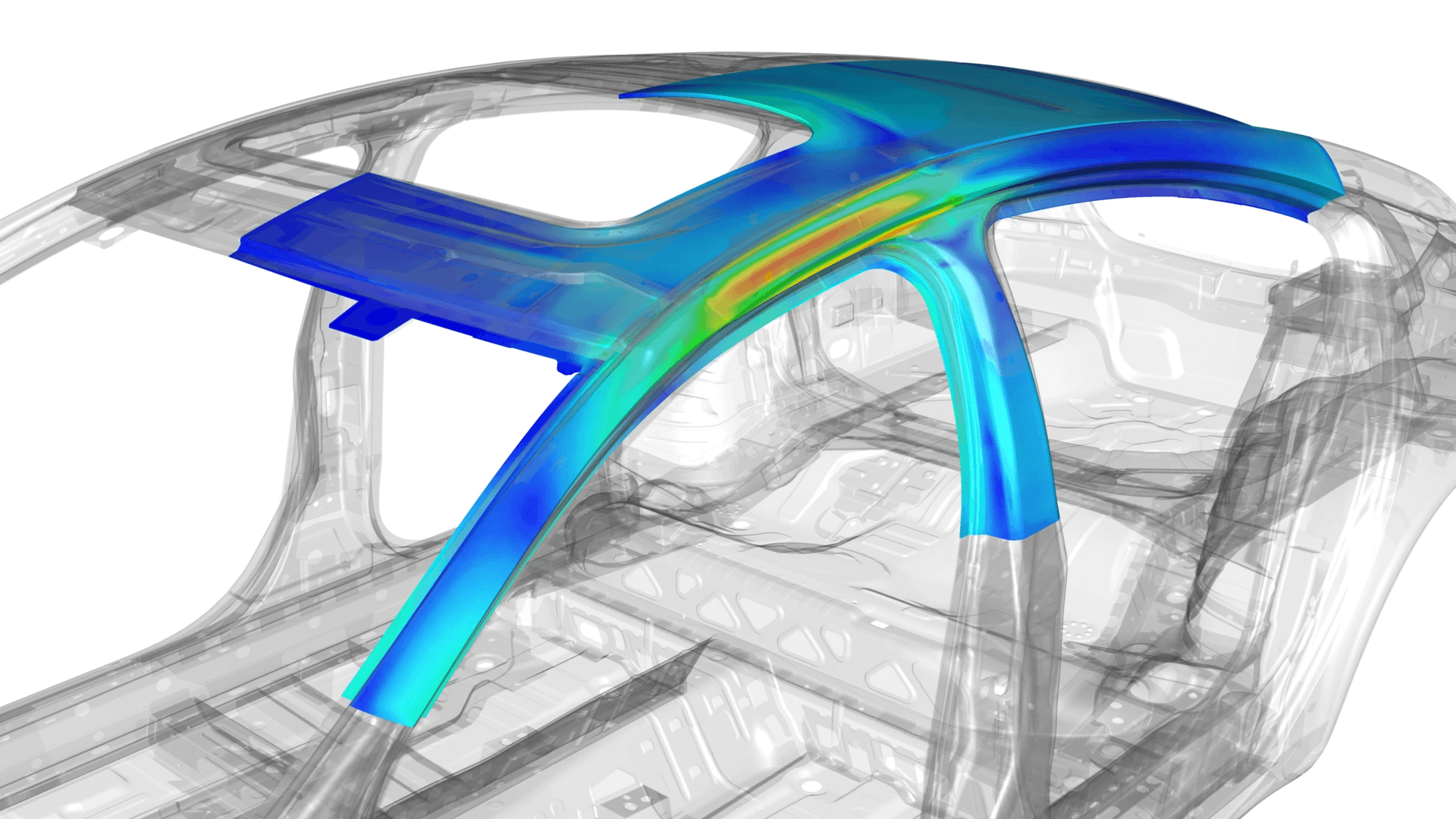
Kabuk Eleman: Levha ve Plak elemanların birleşimidir. Hem düzlem içi hem de düzlem dışı rijitlikleri bulunur.
Modellemede Ağ (Mesh) Yapısı ve Hassasiyeti
Sonlu elemanlar programlarında yapılan en yaygın ve tehlikeli hatalardan biri, sisteme “Otomatik Mesh At” deyip analiz sonuçlarını doğrudan kabul etmektir. Sisteminizi ne kadar küçük elemanlara (mesh) bölerseniz, Galerkin metodu gibi yaklaşımların ürettiği matematiksel hata payı o kadar düşer ve gerçek analitik sonuca o kadar yaklaşırsınız.
Ancak burada kritik bir denge vardır:
-
Kaba Ağ: Elemanların çok büyük seçilmesidir. Kaba bir mesh, matematiksel doğası gereği yapıyı olduğundan daha rijit gösterir. Bu da sistemde oluşacak yer değiştirmeleri ve gerilmeleri eksik (yanlış) hesaplamanıza neden olur.
-
İnce Ağ: Elemanların çok küçük seçilmesidir. Sonuçlar çok hassastır ancak bilgisayarın çözeceği denklem (matris) boyutu devasa boyutlara ulaşır ve analiz günlerce sürebilir.
Bu yüzden profesyonel mühendisler Mesh Bağımsızlık Testi (Mesh Convergence Study) yaparlar. Mesh boyutunu kademeli olarak küçültüp sonuçların (örneğin maksimum çökmenin) artık değişmediği o optimum noktayı (optimum mesh boyutunu) bulur ve analizi orada tamamlarlar.
Dinamik Analizlere Geçiş: Kütle ve Sönüm Matrisleri
Yazımızın başlarında sistemin davranışını F=[K]⋅u formülü ile, yani sadece Rijitlik Matrisi [K] üzerinden tanımlamıştık. Ancak bu formül sadece rüzgarsız, depremsiz, durağan (Statik) yükler için geçerlidir.
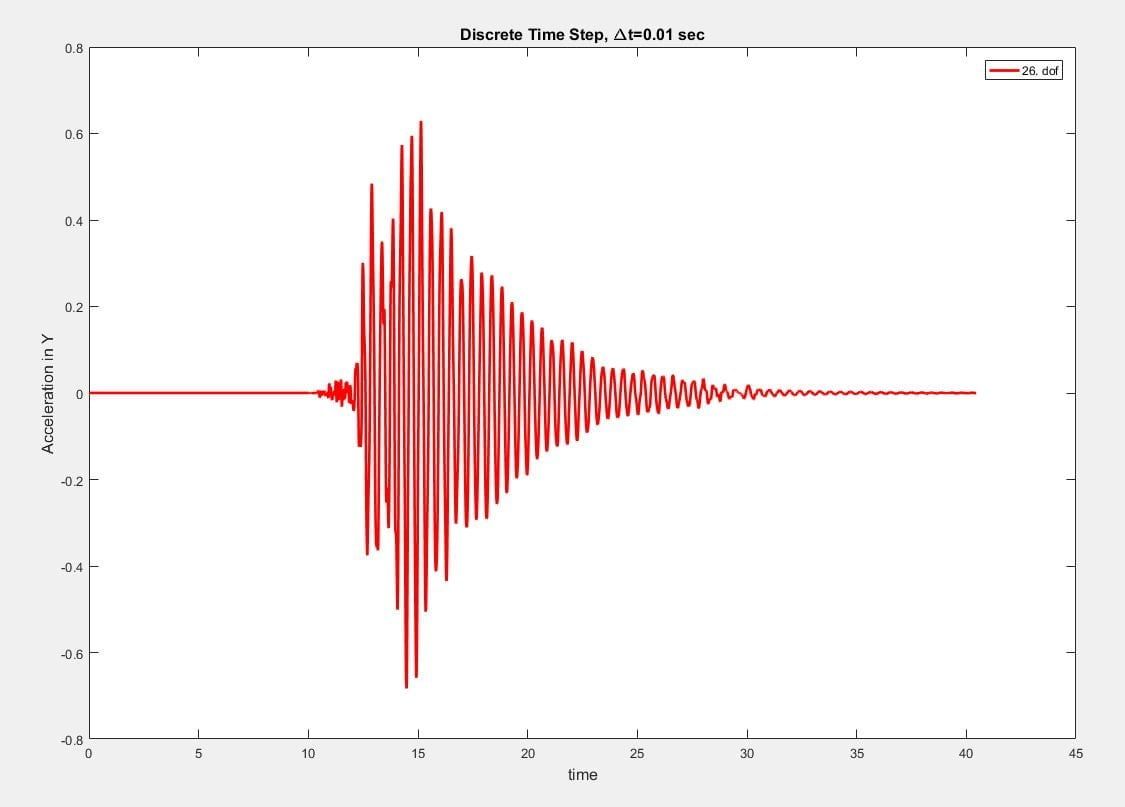
Eğer bir önceki yazımızda bahsettiğimiz gibi yapıya Zaman Tanım Alanında Analiz yapacaksanız, yani deprem gibi dinamik ve değişken bir yük etki edecekse, bu statik denklem yetersiz kalır. Dinamik analizlerde program, rijitlik matrisinin yanına yapının ataletini temsil eden Kütle Matrisini [M] ve enerjiyi sönümleme kapasitesini temsil eden Sönüm Matrisini [C] de eklemek zorundadır.
Denklem artık şu meşhur Dinamik Hareket Denklemine dönüşür:
Burada ivme vektörünü, ise hız vektörünü temsil eder. Yani sonlu elemanlar programı, depremin her bir saniyesi için bu devasa matrisleri birbiriyle çarparak binanın tepkisini hesaplar.
Doğrusal Olmayan (Non-Lineer) Analizlere Giriş
Şu ana kadar anlattığımız mantıkta rijitlik matrisinin [K] analiz boyunca sabit kaldığını varsaydık. Yani çeliğin veya betonun üzerindeki yük kalktığında eski haline geri döneceği (Elastik/Lineer davranış) kabul edilir. Ancak gerçek bir depremde işler böyle yürümez!
Büyük bir depremde beton çatlar, donatılar akar (plastik mafsal oluşur) ve yapı kalıcı olarak şekil değiştirir. TBDY 2018’de Şekildeğiştirmeye Göre Değerlendirme (ŞGDT) olarak geçen bu durum, programda Doğrusal Olmayan (Non-Lineer) Analiz yapılmasını gerektirir.
Non-lineer bir analizde yapı hasar aldıkça elemanların rijitliği düşer. Sonlu elemanlar programı bu durumu simüle edebilmek için sabit bir [K] matrisi kullanamaz. Yükün her artış adımında, hasar gören elemanların lokal rijitliklerini düşürerek tüm sistemin global rijitlik matrisini [K] baştan hesaplamak zorundadır. Bu da lineer (doğrusal) analizlere kıyasla sonlu elemanlar programlarının işlem gücünü ve çözüm süresini katbekat artıran en üst düzey analiz aşamasıdır.

Yorumlar yükleniyor...